# elastic_contact_1d.mbd
#-----------------------------------------------------------------------------
# [Data Block]
begin: data;
problem: initial value;
end: data;
#-----------------------------------------------------------------------------
# [<Problem> Block]
begin: initial value;
initial time: 0.;
final time: 4.;
time step: 1.e-3;
max iterations: 10;
tolerance: 1.e-7;
end: initial value;
#-----------------------------------------------------------------------------
# [Control Data Block]
begin: control data;
use: rigid bodies, gravity, in assembly;
output frequency: 10;
structural nodes: 3;
rigid bodies: 1;
joints: 5;
forces: 1;
gravity;
end: control data;
#-----------------------------------------------------------------------------
# Design Variables
set: real M = 1.; # Mass
set: real L = 1.; # Spring Natural Length
set: real K = 40.; # Spring Stiffness
set: real H = -1.5; # Table Position
set: real Kc = 10000.; # Contact Stiffness
set: real Ec = 1.2; # Contact Stiffness Exponent
set: real Cc = 10.; # Contact Damping
set: real Dc = 0.0001; # Contact Damping Activation Depth
#-----------------------------------------------------------------------------
# Node Labels
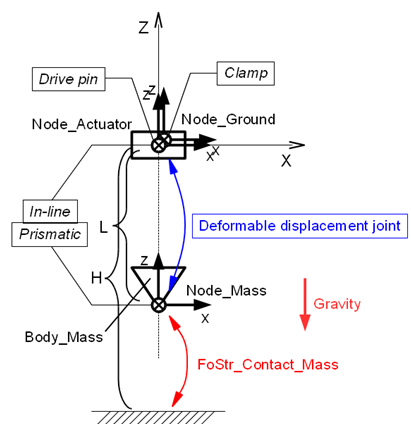
set: integer Node_Actuator = 1;
set: integer Node_Mass = 2;
set: integer Node_Ground = 3;
# Body Labels
set: integer Body_Mass = 1;
# Joint Labels
set: integer JoDrivp_Actuator = 1;
set: integer JoInlin_Actuator_Mass = 2;
set: integer JoPrism_Actuator_Mass = 3;
set: integer JoDfmd_Spring = 4;
set: integer JoClamp_Ground = 5;
# Force Labels
set: integer FoStr_Contact_Mass = 1;
#-----------------------------------------------------------------------------
# Scalar Functions
scalar function: "cubstep",
cubicspline, do not extrapolate,
-0.03, 0.00,
-0.02, 0.00,
-0.01, 0.00,
0.00, 0.00,
1.00, 1.00,
1.01, 1.00,
1.02, 1.00,
1.03, 1.00;
#-----------------------------------------------------------------------------
# [Nodes Block]
begin: nodes;
#-----------------------------------------------------------------------------
# Nodes
structural: Node_Actuator, dynamic,
null, # absolute position
eye, # absolute orientation
null, # absolute velocity
null; # absolute angular velocity
structural: Node_Mass, dynamic,
0., 0., -L, # absolute position
eye, # absolute orientation
null, # absolute velocity
null; # absolute angular velocity
structural: Node_Ground, static,
null, # absolute position
eye, # absolute orientation
null, # absolute velocity
null; # absolute angular velocity
end: nodes;
#-----------------------------------------------------------------------------
# Plugin Variables
set: [node, DZ, Node_Mass, structural, string="X[3]"];
set: [node, VZ, Node_Mass, structural, string="XP[3]"];
#-----------------------------------------------------------------------------
# [Elements Block]
begin: elements;
#-----------------------------------------------------------------------------
# Bodies
body: Body_Mass, Node_Mass,
M, # mass
null, # relative center of mass
eye; # inertia matrix
#-----------------------------------------------------------------------------
# Joints
joint: JoDrivp_Actuator,
drive displacement pin,
Node_Actuator,
null, # node offset
null, # offset
single, 0., 0., 1., sine, 1., pi/2., -1., one, 0.; # position
joint: JoInlin_Actuator_Mass,
in line,
Node_Actuator,
null, # relative line position
eye, # relative normal direction
Node_Mass;
joint: JoPrism_Actuator_Mass,
prismatic,
Node_Actuator,
Node_Mass;
joint: JoDfmd_Spring,
deformable displacement joint,
Node_Actuator,
null,
Node_Mass,
null,
linear elastic isotropic, K,
prestrain, single, 0., 0., -1, const, L;
joint: JoClamp_Ground,
clamp,
Node_Ground,
null, # absolute position
eye; # absolute orientation
#-----------------------------------------------------------------------------
# Forces
force: FoStr_Contact_Mass,
absolute,
Node_Mass,
position, null, # relative arm
single, 0., 0., 1.,
string, "max(0,Kc*sign(H-DZ)*abs(H-DZ)^Ec
-Cc*VZ*model::sf::cubstep((H-DZ)/Dc))"; # force value
#-----------------------------------------------------------------------------
# Gravity
gravity: 0., 0., -1., const, 9.81;
end: elements;