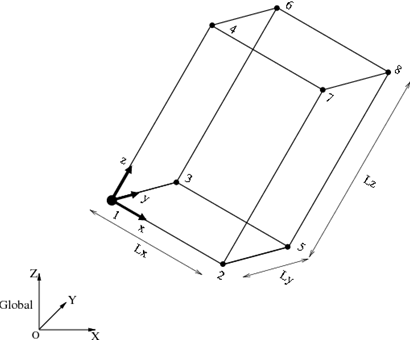
図1のような一般配置の直方体は、一角に張り付いた形状基準枠の位置と回転姿勢および3辺の長さ(Lx, Ly, Lz)で定義できます。形状基準枠の位置座標ベクトルを r 、回転行列を R とすれば、頂点の座標は次の式で求まります。

ここで p0i は基本配置における頂点の座標です。頂点の座標が求まれば、前項と同様に patch で6個の面を作成して直方体を作ることができます。
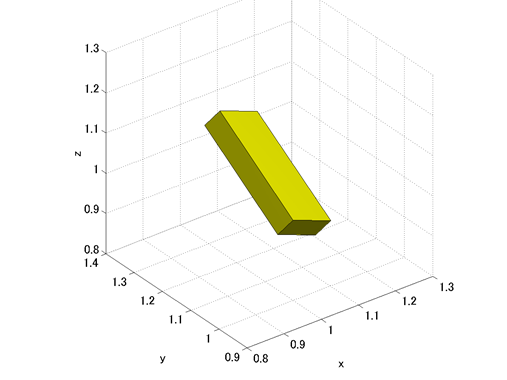
一般配置の直方体を作成するMATLABスクリプトをコード1に、このスクリプトによる描画の結果を図2にそれぞれ示します。スクリプト中で使用されている関数 eulerXYZ() は、XYZオイラー角を回転行列に変換する関数で、コード2のように定義されます。
% make_block_general.m
clear; close all;
% Reference position
r = [1; 1; 1];
% Reference orientation
R = eulerXYZ(-pi/3, 0, pi/6);
% Side lengths
Lx = 0.15;
Ly = 0.05;
Lz = 0.30;
% Vertices
vertices_0 = [
0, 0, 0; % #1
Lx, 0, 0; % #2
0, Ly, 0; % #3
0, 0, Lz; % #4
Lx, Ly, 0; % #5
0, Ly, Lz; % #6
Lx, 0, Lz; % #7
Lx, Ly, Lz]; % #8
vertices = r' + vertices_0*R';
% Faces
faces = [
1, 2, 5, 3; % #1
1, 3, 6, 4; % #2
1, 4, 7, 2; % #3
4, 7, 8, 6; % #4
2, 5, 8, 7; % #5
3, 6, 8, 5]; % #6
% Draw patch
figure(1);
h = patch('Faces', faces, 'Vertices', vertices, 'FaceColor', 'y');
% Axes settings
xlabel('x'); ylabel('y'); zlabel('z');
axis vis3d equal;
view([-37.5, 30]);
camlight;
grid on;
xlim([0.8, 1.3]);
ylim([0.9, 1.4]);
zlim([0.8, 1.3]);
function R = eulerXYZ(a1, a2, a3)
% Convert XYZ Euler angles to rotation matrix
R1 = [
1, 0, 0;
0, cos(a1), -sin(a1);
0, sin(a1), cos(a1)];
R2 = [
cos(a2), 0, sin(a2);
0, 1, 0;
-sin(a2), 0, cos(a2)];
R3 = [
cos(a3), -sin(a3), 0;
sin(a3), cos(a3), 0;
0, 0, 1];
R = R1*R2*R3;
end