# free_rotating_block.mbd
begin: data;
problem: initial value;
end: data;
begin: initial value;
initial time: 0.;
final time: 5.;
time step: 1.e-2;
max iterations: 10;
tolerance: 1.e-6;
end: initial value;
begin: control data;
structural nodes: 1;
rigid bodies: 1;
end: control data;
# Design Variables
set: real M = 1.; # [kg] Mass
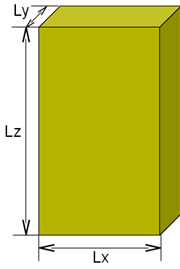
set: real Lx = 0.15; # [m] Width
set: real Ly = 0.05; # [m] Thickness
set: real Lz = 0.3; # [m] Height
set: real Wx0 = 5.; # [rad/s] Initial angular velocity along x axis
set: real Wy0 = 0.; # [rad/s] Initial angular velocity along y axis
set: real Wz0 = 5.; # [rad/s] Initial angular velocity along z axis
set: real Ixx = 1./12.*M*(Ly^2+Lz^2); # [kgm^2] Moment of inertia about x axis
set: real Iyy = 1./12.*M*(Lz^2+Lx^2); # [kgm^2] Moment of inertia about y axis
set: real Izz = 1./12.*M*(Lx^2+Ly^2); # [kgm^2] Moment of inertia about z axis
# Node Labels
set: integer Node_Block = 1;
# Body Labels
set: integer Body_Block = 1;
begin: nodes;
structural: Node_Block, dynamic,
0., 0., 0., # absolute position
eye, # absolute orientation
null, # absolute velocity
Wx0, Wy0, Wz0; # absolute angular velocity
end: nodes;
begin: elements;
body: Body_Block, Node_Block,
M, # mass
null, # relative center of mass
diag, Ixx, Iyy, Izz; # inertia matrix
end: elements;