剛体がある軸周りに自転している時、自転軸を振り回すように外部から角速度が加わると、その角速度と自転軸の双方に対して直角に回転モーメントが発生します。この回転モーメントはジャイロモーメントと呼ばれています。学校の授業や科学博物館などで、回転台の上に乗って回転する自転車の車輪を傾けてジャイロモーメントを体験する実験を見たことがあるのではないでしょうか(動画を見る>>)。この実験を模擬する装置のシミュレーションモデルを作成してみましょう。
図1に示すような、ジャイロモーメント実験装置のシミュレーションモデルを作成します。ステージは地面に対して水平に摩擦無く回転します。ステージに固定された柱にはアームが取り付けられ、アームにはホイールが取り付けられています。ホイールはアームに対して一定の角速度で回転します。アームはステージに対して垂直平面内で回転し、アームの角度はモータで自由に変えることができるとします。
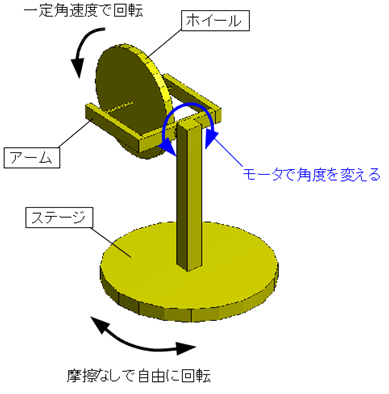
図2に、ジャイロモーメント実験装置のシミュレーションモデルの設計図を示します。図では、reference「Ref_Wheel_Spindle」をnode「Node_Wheel」から少しずらして描いてありますが、実際は同じ位置にあります。
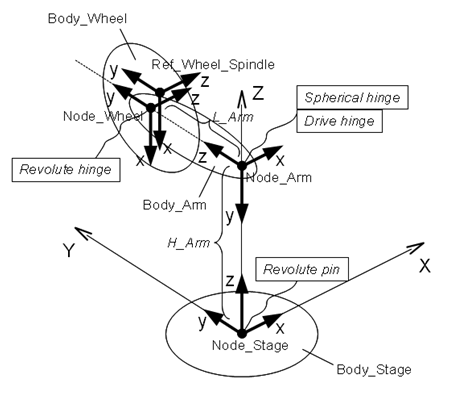
便宜上、各nodeはそれぞれの部品の回転方向を z 方向として定義します。アームとステージの接続は、ジョイントの“spherical hinge”と“drive hinge”を併用して行います。spherical hingeで相対位置を拘束し、drive hingeで相対姿勢を拘束します。drive hingeについては以下で説明します。ところで、この場合、spherical hingeの代わりにrevolute hingeを用いてしまうと、過拘束になってしまうので注意が必要です。(ただし、revolute hingeとtotal jointの組み合わせであれば可能です。)
このジョイントは、2つのnodeの相対姿勢を拘束し(相対位置は拘束しない)、一方のnodeをもう一方のnodeに対して強制回転させることができます。強制回転の回転角はtemplate drive callerによって定義します。drive hingeの基本的なステートメントの型は次のようになります。
joint: <label>,
drive hinge,
<node 1>,
hinge, <relative orientation matrix 1>,
<node 2>,
hinge, <relative orientation matrix 2>,
<hinge orientation>;
ここで、<hinge orientation>には、template drive callerオブジェクトで強制回転の回転角を定義します。
本例題では、このdrive hingeによって、アームの角度を変化させるモータを表現します。
アーム角の入力は自由に行いたいので、drive hingeの<hinge orientation>入力には“scalar function drive”を用いることにします。scalar function driveは、任意のscalar functionを入力することができるdrive callerです。scalar function driveの型は次のようになります。
scalar function, "<scalar function name>",
<scalar function definition>
では、アーム角の入力を図3のグラフに示すように行いたいと仮定しましょう。図3のグラフの関数は区分線形の関数なので、“multilinear”というscalar functionを用いて定義することができます。
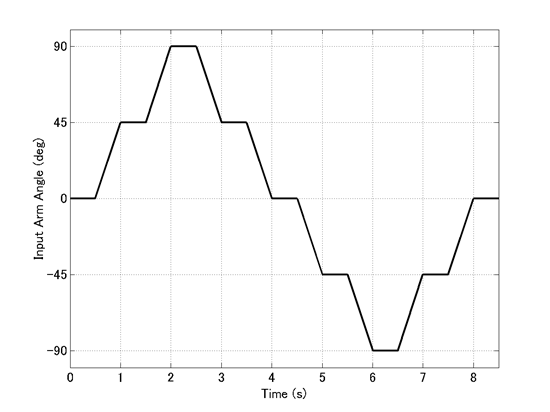
scalar function driveで図3のグラフの関数の入力を行うdrive hingeの定義は次のようになります。template drive callerのsingleを用いて、「Node_Arm」のz軸周りにscalar function driveで強制変位を与えていることに注目してください。入力ファイルでは角度の単位がradianであることに注意しましょう。
set: integer JoDrivh_Stage_Arm = 3;
joint: JoDrivh_Stage_Arm,
drive hinge,
Node_Stage,
hinge, euler, -pi/2., 0., 0., # relative axis orientation
Node_Arm,
hinge, eye, # relative axis orientation
single, 0., 0., 1., scalar function, "Fun_Arm_Input", # position
multilinear,
0.0, 0.,
0.5, 0.,
1.0, pi/4.,
1.5, pi/4.,
2.0, pi/2.,
2.5, pi/2.,
3.0, pi/4.,
3.5, pi/4.,
4.0, 0,
4.5, 0,
5.0, -pi/4.,
5.5, -pi/4.,
6.0, -pi/2.,
6.5, -pi/2.,
7.0, -pi/4.,
7.5, -pi/4.,
8.0, 0.,
8.5, 0.;
以上を踏まえて作成した、例題7のジャイロモーメント実験装置の解析を行うための入力ファイルを以下のコード1に示します。
# gyro_moment.mbd
#-----------------------------------------------------------------------------
# [Data Block]
begin: data;
problem: initial value;
end: data;
#-----------------------------------------------------------------------------
# [<Problem> Block]
begin: initial value;
initial time: 0.;
final time: 8.5;
time step: 1.e-3;
max iterations: 10;
tolerance: 1.e-6;
end: initial value;
#-----------------------------------------------------------------------------
# [Control Data Block]
begin: control data;
output frequency: 10;
structural nodes: 3;
rigid bodies: 3;
joints: 4;
end: control data;
#-----------------------------------------------------------------------------
# Design Variables
set: real I_Stage = 0.1; #[kg m^2] Moment of Inertia of Stage
set: real M_Wheel = 3.; #[kg] Mass of Wheel
set: real R_Wheel = 0.4; #[m] Radius of Wheel
set: real H_Arm = 1.; #[m] Height of Arm
set: real L_Arm = 0.6; #[m] Length of Arm
set: real W_Wheel = 10*pi; #[rad/s] Angular Velocity of Wheel
#-----------------------------------------------------------------------------
# Reference Labels
set: integer Ref_Wheel_Spindle = 1;
# Node Labels
set: integer Node_Stage = 1;
set: integer Node_Arm = 2;
set: integer Node_Wheel = 3;
# Body Labels
set: integer Body_Stage = 1;
set: integer Body_Arm = 2;
set: integer Body_Wheel = 3;
# Joint Labels
set: integer JoRevp_Stage = 1;
set: integer JoSphh_Stage_Arm = 2;
set: integer JoDrivh_Stage_Arm = 3;
set: integer JoRevh_Arm_Wheel = 4;
#-----------------------------------------------------------------------------
# Intermediate Variables
set: real Ixx_Wheel = M_Wheel*R_Wheel^2./4.;
set: real Iyy_Wheel = M_Wheel*R_Wheel^2./4.;
set: real Izz_Wheel = M_Wheel*R_Wheel^2./2.;
#-----------------------------------------------------------------------------
# References
reference: Ref_Wheel_Spindle,
0., L_Arm, H_Arm, # absolute position
euler, 0., pi/2., 0., # absolute orientation
null, # absolute velocity
null; # absolute angular velocity
#-----------------------------------------------------------------------------
# [Nodes Block]
begin: nodes;
#-----------------------------------------------------------------------------
# Nodes
structural: Node_Stage, dynamic,
null, # absolute position
eye, # absolute orientation
null, # absolute velocity
null; # absolute angular velocity
structural: Node_Arm, dynamic,
0., 0., H_Arm, # absolute position
euler, -pi/2., 0., 0., # absolute orientation
null, # absolute velocity
null; # absolute angular velocity
structural: Node_Wheel, dynamic,
reference, Ref_Wheel_Spindle, null, # absolute position
reference, Ref_Wheel_Spindle, eye, # absolute orientation
reference, Ref_Wheel_Spindle, null, # absolute velocity
reference, Ref_Wheel_Spindle, 0., 0., -W_Wheel; # absolute angular velocity
end: nodes;
#-----------------------------------------------------------------------------
# [Elements Block]
begin: elements;
#-----------------------------------------------------------------------------
# Bodies
body: Body_Stage, Node_Stage,
1., # mass
null, # relative center of mass
diag, 1., 1., I_Stage; # inertia matrix
body: Body_Arm, Node_Arm,
1., # mass
null, # relative center of mass
diag, 1.e-6, 1.e-6, 1.e-6; # inertia matrix
body: Body_Wheel, Node_Wheel,
M_Wheel, # mass
null, # relative center of mass
diag, Ixx_Wheel, Iyy_Wheel, Izz_Wheel; # inertia matrix
#-----------------------------------------------------------------------------
# Joints
joint: JoRevp_Stage,
revolute pin,
Node_Stage,
null, # relative offset
null; # absolute pin position
joint: JoSphh_Stage_Arm,
spherical hinge,
Node_Stage,
0., 0., H_Arm, # relative offset
Node_Arm,
null; # relative offset
joint: JoDrivh_Stage_Arm,
drive hinge,
Node_Stage,
hinge, euler, -pi/2., 0., 0., # relative axis orientation
Node_Arm,
hinge, eye, # relative axis orientation
single, 0., 0., 1., scalar function, "Fun_Arm_Input", # position
multilinear,
0.0, 0.,
0.5, 0.,
1.0, pi/4.,
1.5, pi/4.,
2.0, pi/2.,
2.5, pi/2.,
3.0, pi/4.,
3.5, pi/4.,
4.0, 0,
4.5, 0,
5.0, -pi/4.,
5.5, -pi/4.,
6.0, -pi/2.,
6.5, -pi/2.,
7.0, -pi/4.,
7.5, -pi/4.,
8.0, 0.,
8.5, 0.;
joint: JoRevh_Arm_Wheel,
revolute hinge,
Node_Arm,
reference, Ref_Wheel_Spindle, null, # relative offset
hinge, reference, Ref_Wheel_Spindle, eye, # relative axis orientation
Node_Wheel,
reference, Ref_Wheel_Spindle, null, # relative offset
hinge, reference, Ref_Wheel_Spindle, eye; # relative axis orientation
end: elements;
コード1の入力ファイルによる、シミュレーション結果のアニメーションを動画1に示します。
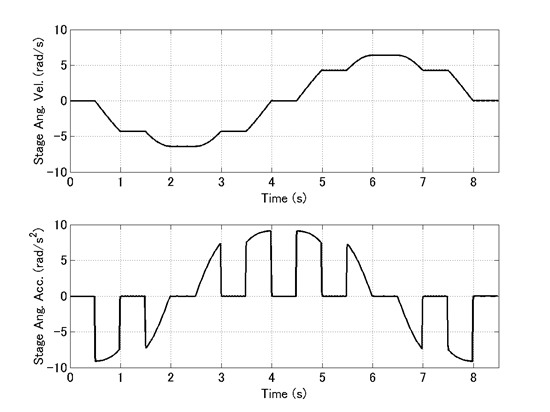
シミュレーション結果より、ステージの角速度と角加速度のプロットを図4に示します。アーム角が変化する時(図3参照)、ジャイロモーメントが発生し、ステージに角加速度が生じます。アーム角が±90度に近づくに従って、ステージに生じる角加速度が小さくなります。これは、ジャイロモーメントベクトルが水平方向に近づき、その鉛直方向成分が減少するためです。