本項では、外部からの力を表現する“structural force”要素を紹介します。また、structural forceを定義するのに必要な“template drive caller”オブジェクトについて説明します。
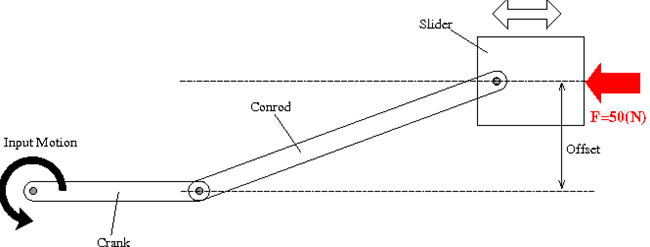
例題5で作成したクランク‐スライダ機構のシミュレーションモデルにおいて、スライダに外力が働く場合を考えてみましょう。図1に示すようにスライダに外力が働くとして、入力ファイルを書き直してみます。
外部から働く力は“structural force”要素で表現します。structural forceのステートメントの型は次のようになります。
force: <label>,
{ absolute | follower },
<node label>,
position, <relative arm>,
<force value>;
ここで、<node label>は作用対象のnodeのラベル、<relative arm>は作用点のnodeに対する相対座標です。また<force value>はtemplate drive callerオブジェクトによって指定される力の時間関数です。template drive callerについては以下で説明します。
absoluteとfollowerのどちらかを選択します。absoluteを選択すると、力の向きはグローバル座標系に対して常に一定に保たれます。一方、followerを選択すると、力の向きはnodeとともに変化します。
第18項で紹介したdrive callerは、時間依存のスカラー、つまり1次元の入力でした。“template drive caller”は、多次元の入力を与える必要がある場合に用います。例えば、3次元ベクトルや6次元ベクトルの入力が必要な場合です。次の4種類のtemplate drive callerがあります。
nullは零ベクトルを表し、「何も入力しない」ことを意味します。
singleは次のように記述し、基準ベクトルとゲインによって多次元の入力を定義します。
single,
<entity>, <drive caller>
ここで、<entity>は一定の基準ベクトル、<drive caller>は時間依存のゲインです。
componentは次のように記述し、多次元の入力を成分ごとに定義します。この場合は、次元の数だけdrive callerが必要です。
component,
{ inactive | <drive caller> }, { inactive | <drive caller> }, ...
arrayについての説明はここでは省略します。
例題5のクランク‐スライダ機構のシミュレーションモデルに、F = 50(N) の一定スライダ外力をstructural forceによって追加します。スライダは1自由度しか持たないので、作用点はどこでも構いません。「Node_Slider」の位置を作用点とすれば簡単でしょう。以下は、-x方向のスライダ外力を、template drive callerのsingleによって定義します。
set: integer FoStr_Slider = 1;
force: FoStr_Slider,
absolute,
Node_Slider,
position, null, # relative arm
single, -1, 0, 0, const, 50; # force value
コード1に、スライダ外力を追加した例題6のクランク‐スライダ機構モデルの入力ファイルの全体を示します。structural force要素を追加した最後の箇所以外は例題5の入力ファイルとほとんど同じですが、control dataブロック内でforcesの項が追加されていることに注目してください。
# crank_slider_2.mbd
#-----------------------------------------------------------------------------
# [Data Block]
begin: data;
problem: initial value;
end: data;
#-----------------------------------------------------------------------------
# [<Problem> Block]
begin: initial value;
initial time: 0.;
final time: 5.;
time step: 1.e-2;
max iterations: 10;
tolerance: 1.e-6;
end: initial value;
#-----------------------------------------------------------------------------
# [Control Data Block]
begin: control data;
structural nodes: 4;
rigid bodies: 3;
joints: 6;
forces: 1;
end: control data;
#-----------------------------------------------------------------------------
# Design Variables
set: real Mass_Crank = 1.;
set: real Mass_Conrod = 1.;
set: real Mass_Slider = 1.;
set: real Length_Crank = 0.2;
set: real Length_Conrod = 0.4;
set: real Offset_Slider = 0.05;
#-----------------------------------------------------------------------------
# Reference Labels
set: integer Ref_Conrod = 1;
# Node Labels
set: integer Node_Ground = 1;
set: integer Node_Crank = 2;
set: integer Node_Conrod = 3;
set: integer Node_Slider = 4;
# Body Labels
set: integer Body_Crank = 1;
set: integer Body_Conrod = 2;
set: integer Body_Slider = 3;
# Joint Labels
set: integer JoClamp_Ground = 1;
set: integer JoAxrot_Ground_Crank = 2;
set: integer JoRevh_Crank_Conrod = 3;
set: integer JoInlin_Conrod_Slider = 4;
set: integer JoInlin_Ground_Slider = 5;
set: integer JoPrism_Ground_Slider = 6;
# Force Labels
set: integer FoStr_Slider = 1;
#-----------------------------------------------------------------------------
# Intermediate Variables
set: real Izz_Crank = Mass_Crank*Length_Crank^2./12.;
set: real Izz_Conrod = Mass_Conrod*Length_Conrod^2./12.;
#-----------------------------------------------------------------------------
# References
reference: Ref_Conrod,
Length_Crank, 0., 0., # absolute position
euler, 0., 0., asin(Offset_Slider/Length_Conrod), # absolute orientation
null, # absolute velocity
null; # absolute angular velocity
#-----------------------------------------------------------------------------
# [Nodes Block]
begin: nodes;
#-----------------------------------------------------------------------------
# Nodes
structural: Node_Ground, static,
0., 0., 0., # absolute position
eye, # absolute orientation
null, # absolute velocity
null; # absolute angular velocity
structural: Node_Crank, dynamic,
Length_Crank/2., 0., 0., # absolute position
eye, # absolute orientation
null, # absolute velocity
null; # absolute angular velocity
structural: Node_Conrod, dynamic,
reference, Ref_Conrod, Length_Conrod/2., 0., 0., # absolute position
reference, Ref_Conrod, eye, # absolute orientation
null, # absolute velocity
null; # absolute angular velocity
structural: Node_Slider, dynamic,
reference, Ref_Conrod, Length_Conrod, 0., 0., # absolute position
eye, # absolute orientation
null, # absolute velocity
null; # absolute angular velocity
end: nodes;
#-----------------------------------------------------------------------------
# [Elements Block]
begin: elements;
#-----------------------------------------------------------------------------
# Bodies
body: Body_Crank, Node_Crank,
Mass_Crank, # mass
null, # relative center of mass
diag, 1., 1., Izz_Crank; # inertia matrix
body: Body_Conrod, Node_Conrod,
Mass_Conrod, # mass
null, # relative center of mass
diag, 1., 1., Izz_Conrod; # inertia matrix
body: Body_Slider, Node_Slider,
Mass_Slider, # mass
null, # relative center of mass
eye; # inertia matrix
#-----------------------------------------------------------------------------
# Joints
joint: JoClamp_Ground,
clamp,
Node_Ground,
null, # absolute position
eye; # absolute orientation
joint: JoAxrot_Ground_Crank,
axial rotation,
Node_Ground,
null, # relative offset
hinge, eye, # relative orientation
Node_Crank,
-Length_Crank/2., 0., 0., # relative offset
hinge, eye, # relative orientation
ramp, 2.*pi, 0., 1., 0.; # angular velocity
joint: JoRevh_Crank_Conrod,
revolute hinge,
Node_Crank,
reference, Ref_Conrod, null, # relative offset
hinge, reference, Ref_Conrod, eye, # relative axis orientation
Node_Conrod,
reference, Ref_Conrod, null, # relative offset
hinge, reference, Ref_Conrod, eye; # relative axis orientation
joint: JoInlin_Conrod_Slider,
in line,
Node_Conrod,
Length_Conrod/2., 0., 0., # relative line position
eye, # relative orientation
Node_Slider;
joint: JoInlin_Ground_Slider,
in line,
Node_Ground,
0., Offset_Slider, 0., # relative line position
1, 0., 0., -1., 3, 1., 0., 0., # relative orientation
Node_Slider;
joint: JoPrism_Ground_Slider,
prismatic,
Node_Ground,
Node_Slider;
#-----------------------------------------------------------------------------
# Forces
force: FoStr_Slider,
absolute,
Node_Slider,
position, null, # relative arm
single, -1, 0, 0, const, 50; # force value
end: elements;
