 力学
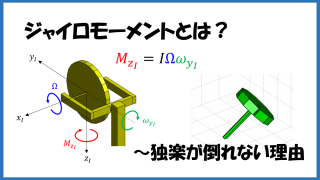
力学 ジャイロモーメントとは? ~ 独楽(こま)が倒れない理由
独楽(こま)の動きって不思議ですよね。回っている独楽はなぜ倒れないのでしょうか?
独楽が倒れない理由は、ジャイロモーメントと呼ばれる見かけのモーメントによって説明することができます。この記事では、ジャイロモーメントとは何か、そ...
力学  Scilab
Scilab  Scilab
Scilab  力学
力学  力学
力学  力学
力学  力学
力学  力学
力学  力学
力学  力学
力学